
Электронные промышленные устройства
Cулимов Ю.И.
Кафедра ПрЭ
Томск-2001
№ 1
Однофазные микрокоманды:
• все микрооперации которых выполняются одновременно в течение одного такта.
№ 2
Управляющие автоматы с “жесткой логикой”, это автоматы:
• выполненные на логических схемах, физически соединенных между собой и не допускающие изменение алгоритма работы;
• состоящие из регистра команд, счетчика тактов, дешифратора тактов, дешифратора кода операции и логических схем формирования выходных сигналов.
№ 3
Параметры, которыми характеризуется конечный автомат:
• множество входных сигналов; выходных сигналов; состояний.
№ 4
Функции переходов конечного автомата определяет:
• порядок смены внутренних состояний.
№ 5
Зависимость, которую устанавливает функция переходов в конечном автомате:
• это зависимость внутреннего состояния автомата на следующем такте от состояния входа и внутреннего состояния на текущем такте.
№ 6
Отличие автомата Мура от автомата Мили:
• автоматы отличаются способом подачи входных сигналов на автомат;
• отличаются количеством состояний автомата.
№ 7
Наиболее часто используется при проектировании цифровых автоматов:
• D-триггер с динамическим тактовым входом.
№ 8
Выходные сигналы автомата Мура определяются:
• внутренним состоянием автомата.
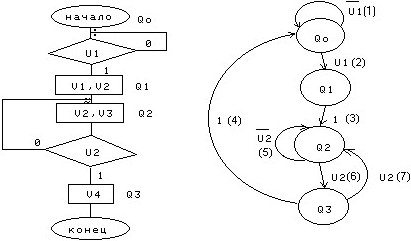
№ 9
Лишние дуги в графе автомата Мура (номера дуг в скобках).
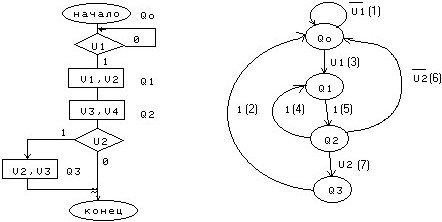
• 4.
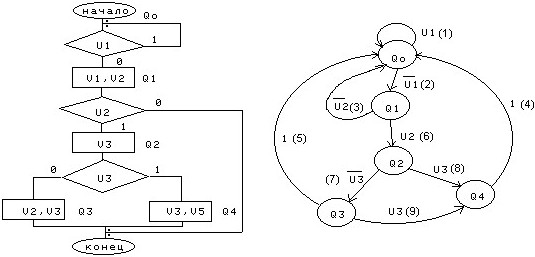
№ 10
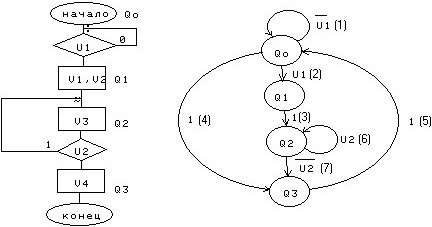
• 4.
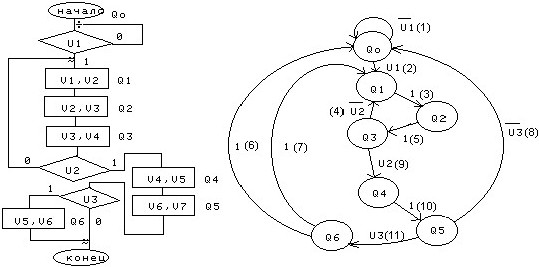
№ 11
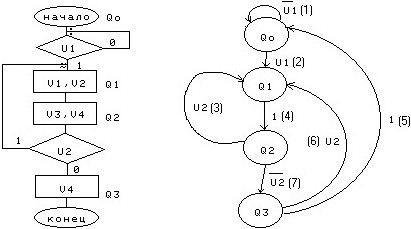
• 6.
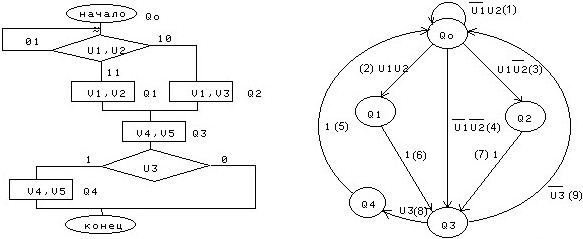
№ 12
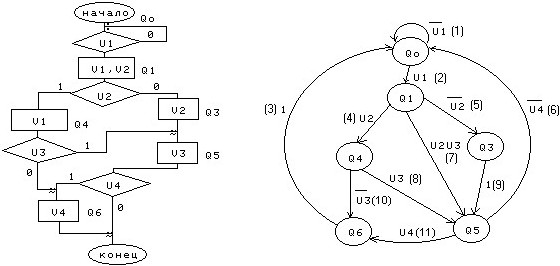
• 7.
№ 13,14
• 7.
№ 15
• 9.
№ 16
• 7.
№ 17
• 4.
№ 1
Техническое задание на разработку системы разрабатывает:
• исполнитель при согласовании с заказчиком.
№ 2
Микрокомпьютерная система управления включает в себя:
• множество входов для приема информации из внешнего окружения;
• множество выходов для передачи информации к внешнему окружению;
• набор программно-аппаратных компонентов, выполняющих определенные функции по отношению к внешнему окружению;
• внешнее окружение.
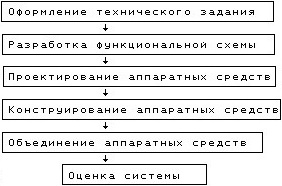
№ 3
Этапы в цикле проектирования аппаратной системы.
• 
№ 4
Микрокомпьютерная система управления имеет два входа и два выхода, представлена следующими функциями преобразования:

• Проверить вход 1 и хранить его значение;
Проверить вход 2 и хранить его значение;
Если значение входа 1 больше 4 и меньше 8;
Если значение входа 2 больше 4 и меньше 8;
то установить значение выхода 2 равным 4;
иначе установить значение выхода 2 равным 0.
№ 5
Конструкция:
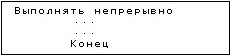
используется:
• если при работе системы требуется повторная проверка выходных сигналов с датчиков;
• если в системе имеется такая операция, которая позволяла бы выполнять некоторые операции бесконечное число раз.
№ 6
Способы взаимодействия между оператором и системой:
• тактильные входы;
• визуальные выходы;
• звуковые выходы;
• косвенные входы.
№ 7
Метод разработки программного обеспечения, включающий разбиение системы на модули с последующим разбиением модулей на процедуры - нисходящее проектирование.
№ 8
Функционально-модульная структура системы охранной сигнализации.

Название необозначенного модуля:
• исполнительный, управляющий.
№ 9
Программный модуль включает в себя:
• набор процедур, реализующих принадлежащие модулю функции.
№ 10
В модуль восстановления любой системы входят процедуры:
• инициализации системы;
• инициализации аппаратных средств;
• восстановления системы.
№ 11
Функции исполнительной процедуры:
• распределяет обязанности между процедурами более низкого уровня.
№ 12
Конструкция:
установить ... на (В) ...
установить ...
• относится к категории языка проектирования - присваивания.
№ 13
Конструкция:
ЕСЛИ условие проверки есть истина
ТО выполнить что-либо
ЕСЛИ условие проверки есть истина
ТО выполнить что-либо
ИНАЧЕ выполнить что-либо другое
• условная конструкция.
№ 14
ВЫПОЛНИТЬ
...
КОНЕЦ
ВЫПОЛНИТЬ ДЛЯ КАЖДОГО ... набора предметов
...
• конструкция цикла.
№ 15
Проектирование микрокомпьютерной системы начинается:
• с изучения потребительского рынка и проверки системы на патентную чистоту.
№ 16
Суть “мозгового штурма”:
• собирается коллектив с разным уровнем знаний и без критики высказывают свои мысли. Высказанные идеи протоколируются и затем анализируются.
№ 17
Рекурсивная процедура:
• процедура, которая при определенных условиях вызывает сама себя.
№ 18
Дерево вызова процедур:
• это описание алгоритма программы, состоящее из связанных между собой блоков подпрограмм, входящих в объединяющие их подпрограммы высшего ранга.
№ 1
Несколько единиц технологического оборудования, снабженных средствами и системами, обеспечивающими функционирование оборудования в автоматическом режиме, называются
• гибкой производственной системой.
№ 2
Гибкая производственная система по организационной структуре подразделяется на уровни (гибкие):
• производственный модуль;
• автоматизированная линия;
• автоматизированный участок;
• автоматизированный цех;
• автоматизированный завод.
№ 3
Единица технологического оборудования, оснащенная системой ЧПУ или другим устройством программного управления и работающая как самостоятельно, так и в составе гибкой производственной системы, называется
• гибким производственным модулем.
№ 4
Гибкий производственный модуль включает средства автоматизации:
• накопители программных средств;
• устройство загрузки/выгрузки деталей;
• устройство замены технологической оснастки;
• устройство удаления стружки;
• устройство автоматизированного контроля.
№ 5
Реализация этапов производственного цикла изделий:
• 1) маркетинг
2) материально-технологические процессы
3) производство
4) контроль и испытание
5) хранение
6) сбыт.
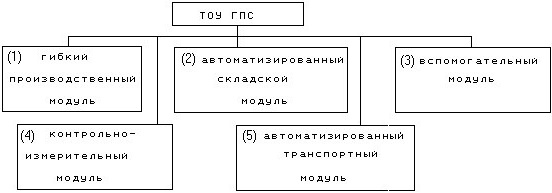
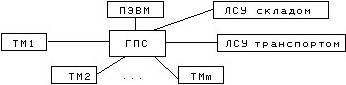
№ 6
Модули в составе технологического объекта управления гибкой производственной системы.
• 
№ 7
• иерархическая структура.
№ 8
• неполносвязанная структура.
№ 9
• структура со связями кольцевого типа.
№ 10
В состав программного обеспечения гибкой производственной линии входит:
• базовое программное обеспечение;
• общесистемное программное обеспечение;
• функциональное программное обеспечение.
№ 11
Базовое программное обеспечение гибкой производственной системы состоит из составляющих:
• драйверы стандартных устройств;
• обслуживающие программы;
• языки программирования;
• операционные системы.
№ 12
Функциональное программное обеспечение ГПС:
• средства проектирования управляющих программ;
• САПР управляющих программ;
• пакет прикладных программ функционального назначения;
• система ведения управляющих программ;
• средства интеграции и САПР управляющих программ.
№ 13
В общесистемное программное обеспечение гибкой производственной системы входит:
• диагностика;
• методы моделирования;
• оптимизационные методы решения задач ГПС.
№ 1
Скорость резания при обработке заготовки диаметром 50 мм и частоте вращения шпинделя 1000 об/мин.
• 157 мм/мин.
№ 2
Величина площади срезаемого слоя при обработке круглой заготовки, если подача на оборот равна 0,5 мм/об, а глубина резания 0,15 мм.
• 0,075 мм².
№ 3
Часть производственного процесса, включающая целенаправленные действия по изменению предмета труда называется
• технологическим процессом.
№ 4
Законченная часть технологического процесса обработки заготовки, выполненная на одном рабочем месте -
• технологическая операция.
№ 5
Часть цеха, где размещено соответствующее технологическое оборудование:
• рабочее место.
№ 6
Законченная часть технологической операции, выполняемая одними и теми же средствами технологического оснащения при постоянных технологических режимах и установке:
• технологический переход.
№ 7
- состоящая из действий человека и оборудования, не сопровождающаяся изменением свойств предмета труда:
• вспомогательный переход.
№ 8
- состоящая из однократного перемещения инструмента относительно заготовки с изменением формы, размера и качества поверхности:
• рабочий ход.
№ 9
Часть технологической операции, выполняемой при неизменном закреплении заготовки:
• установка.
№ 10
Кодирование в системах с ЧПУ:
• запись текста в определенной форме с последующим переносом на программоноситель.
№ 11
Кадр программы:
• последовательность слов, расположенных в определенном порядке и несущих информацию об одной технологической операции.
№ 12
Формат кадра:
• условная запись структуры кадра управляющей программы с максимальным объемом информации.
№ 13
Функция М, используемая при написании управляющей программы:
• вспомогательная.
№ 14
Функция G:
• подготовительная.
№ 15
Станок для обработки заготовок больших диаметров и малой длины:
• лобовой.
№ 16
Система чертеж-деталь состоит:
• из подсистем, выполняющих различные технологические операции и построенных по различным принципам.
№ 17
Совокупность специализированных устройств, методов и средств, необходимых для осуществления числового программного управления станком:
• система ЧПУ.
№ 18
Системы с встроенным компьютером (микропроцессором):
• CNC.
№ 19
Позиционные устройства ЧПУ:
• устройства, обеспечивающие автоматическое перемещение рабочего органа станка в заданную программой координату без обработки в процессе перемещения рабочего органа.
№ 20
Контурные криволинейные системы ЧПУ:
• системы, обеспечивающие формообразование при обработке за счет одновременного движения режущего инструмента по нескольким координатам.
№ 21
Обозначение 16К20Ф4 имеет:
• токарный станок с позиционно-контурным УЧПУ.
№ 22
В УЧПУ типа КМ43 используются:
• фотоэлектрические датчики;
• индукционные датчики типа ВТМ.
№ 23
Часть производственного процесса, включающая целенаправленные действия по изменению предмета труда:
• технологический процесс.
№ 1
Структуры систем управления магистральными нефтепроводами:
• централизованная;
• децентрализованная;
• смешанная.
№ 2
Датчики механических величин при управлении магистральными нефтепроводами:
• вибрации;
• угловой скорости;
• усилия.
№ 3
Датчики электрических величин:
• датчики величины тока;
• напряжения;
• мощности.
№ 4
Датчики энергетических величин:
• датчики давления;
• температуры;
• расхода;
• уровня.
№ 5
Датчики физико-химических величин:
• датчики вязкости;
• состава воздуха;
• содержания воды, солей, серы.
№ 6
Известительные сигналы:
• неисправность оборудования;
• состояние работающего оборудования.
№ 7
Предупредительные сигналы:
• выход за допустимые границы значений технологического параметра;
• сигнализация о завершении выполнения какой-либо технологической операции.
№ 8
Аварийные телесигналы сообщают о:
• пожаре;
• загазованности;
• затопления в помещениях;
• самопроизвольном включении или отключении оборудования.
№ 9
Оперативные телеизмерения включают мгновенные значения параметров:
• значения вибрации насосных агрегатов;
• угловой скорости вращения роторов двигателей;
• значения величин тока и напряжения;
• значения давления и температуры.
№ 10
- интегральные телеизмерения:
• потребляемая мощность;
• расход нефти в нефтепроводе;
• уровень нефти в резервуарных парках;
• содержание воды, соли и серы.
№ 11
Выходные сигналы телеуправления делятся на:
• сигналы защиты;
• сигналы блокировки;
• сигнал “программа”.
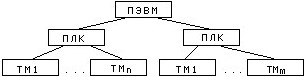
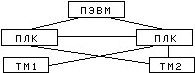
№ 12
В состав технических средств нижнего уровня современной системы управления магистральными нефтепроводами Центральной Сибири входит:
• групповая замерная установка;
• программируемый логический контроллер;
• объект управления.
№ 1
Источник энергии электрического сервомеханизма:
• электродвигатель.
№ 2
Раздел робототехники, изучающий методы функциональной имитации возможностей человеческого разума и создания технических систем, способных самостоятельно рассуждать, решать задачи с неизвестной для данного устройства схемой решения:
• искусственный интеллект.
№ 3
Источник энергии пневматического сервомеханизма:
• сжатый воздух.
№ 4
Источник энергии электрогидравлического сервомеханизма:
• масло.
№ 5
Робот для сортировки деталей на конвейере должен иметь:
• систему технического зрения;
• искусственную кисть и захватное устройство.
№ 6
Робототехнические системы по принципу управления разделяются на роботы:
• программные;
• адаптивные;
• интеллектуальные.
№ 7
Объекты управления для сервомеханизмов, применяемых в исполнительных системах:
• позиция звеньев манипулятора.
№ 8
Крутящий момент на валу двигателя промышленного робота позволяет измерять:
• тензометрический датчик.
№ 9
Искусственная система, имитирующая решение человеком сложных задач в процессе его жизнедеятельности:
• искусственный интеллект.
№ 10
Электрическому сервомеханизму соответствуют:
• простая конструкция;
• сравнительно высокая стоимость;
• малая стоимость;
• невысокая мощность;
• отсутствие загрязненности рабочего места.
№ 11
Устройство для выполнения двигательных функций, аналогичных функциям руки человека:
• манипулятор.
№ 12
Мобильные роботы:
• роботы-тележки;
• педипуляторы.
№ 13
Пневматическому сервомеханизму соответствуют:
• сложная конструкция;
• сравнительно высокая стоимость;
• средняя мощность;
• отсутствие загрязнения рабочего места.
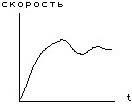
№ 14
График системы управления с одной позиционной обратной связью.
• 
№ 15
Автоматическая машина, состоящая из исполнительного устройства в виде манипулятора и перепрограммируемого устройства программного управления:
• промышленный робот.
№ 16
Промышленный робот состоит из:
• системы управления;
• манипуляционного механизма;
• соединительных кабелей.
№ 17
Значение выходного напряжения потенциометрического датчика перемещения, если движок потенциометра переместился на 1 мм (к=1):
• 1 мВ.
№ 18
Выходное напряжения потенциометрического датчика углового перемещения, если движок потенциометра переместился на угол, равный 0,5 град. (к=2):
• 1 В.
№ 19
Роботы, приспособленные для определенного вида технологических операций, называются
• специализированными.
№ 20
Гидравлическому сервомеханизму соответствуют:
• сложная конструкция;
• высокая стоимость;
• большая мощность;
• загрязнение рабочего места.
№ 21
Роботы с контурным управлением применяют для:
• дуговой сварки;
• окраски;
• абразивной зачистке облоя;
• сложных сборочных работ.
№ 22
В робототехнических системах используются принципы:
• разомкнутого управления;
• управления по возмущению;
• обратной связи.
№ 23
В роботе-манипуляторе РМ104 применен:
• программный режим обмена информацией.
№ 24
Роботы, которые функционируют по жестко-заданной программе, называются
• программными.
№ 25
Гибкий производственный модуль состоит из:
• микроЭВМ, один-три станка, роботы, вспомогательные механизмы.
№ 26
Экономические и социальные последствия, появляющиеся при внедрении промышленных роботов в гибких производственных системах:
• повышение экономической эффективности;
• увеличение гибкости переналадки;
• экономия площади;
• появление превосходства робота перед человеком по таким признакам как выносливость к внешним условиям, неуставаемость в течение длительного времени работы.
№ 27
Способы программирования в робототехнике:
• программирование расчетным путем;
• программирование путем обучения;
• перепрограммирование путем переключения программ.
№ 1
Для измерения температуры используются измерительные преобразователи:
• термометры сопротивления;
• устройства контроля температуры подшипников;
• сигнализаторы температуры.
№ 2
- для измерения давления:
• манометры;
• вакуумметры;
• мановакуумметры с унифицированным выходом;
• напоромеры.
№ 3
- для измерения уровня:
• преобразователи уровня в резервуарах с унифицированным выходом;
• датчики уровня в напорных емкостях;
• сигнализаторы уровня;
• устройства для определения уровня раздела фаз нефть-эмульсия-вода.
№ 4
Под расходом количества понимается:
• расход жидкости;
• расход газа;
• подача скважин.
№ 5
Для определения физико-химических свойств продукции используются датчики:
• содержания воды в нефти;
• плотности и вязкости нефти;
• определения довзрывоопасных концентраций горючих газов;
• содержания мехпримесей в нефти.
№ 6
При добыче и транспортировке нефти используются информационно-измерительные системы:
• оперативного учета;
• коммерческого учета;
• учета уровня в резервуарных парках;
• глубинных параметров скважин.
№ 7
Исполнительные механизмы применяющиеся в магистральных нефтегазопроводах:
• задвижка с электроприводом;
• кран шаровой с гидроприводом;
• регулятор давления прямого действия.
№ 8
В магистральных нефтепроводах используются:
• гидропривод;
• электропривод;
• электрогидравлический привод.
№ 1
Внешнее информационное обеспечение в АСУ ТП обеспечивает:
• классификацию и кодирование входной информации;
• - выходной информации;
• - входной и выходной информации внутри АСУ ТП;
• нормативно-справочную информацию;
• методические материалы, инструкции и язык описания оперативной информации.
№ 2
- внутреннее информационное обеспечение:
• языки описания информационных потоков внутри АСУ ТП.
№ 3
Технологические процессы в процессе производства обслуживают системы:
• СДКУ;
• АСУ О;
• АСУ П;
• АСУ ГПС;
• АСУ ТП.
№ 4
В производственных процессах при изготовлении определенной номенклатуры изделий участвуют системы:
• АСУ ОТ;
• АСУ ГПС;
• СДКУ;
• АСУ ТП.
№ 5
Уровень сбора и предварительной обработки информации системы дистанционного контроля и управления включает в себя:
• аппаратные средства для преобразования физических величин в электрические сигналы;
• первичные преобразователи, нормализующие преобразователи и элементы управления технологическими процессами.
№ 6
Нижний уровень системы дистанционного контроля и управления состоит из:
• рабочих станций операторов;
• контроллеров нижнего уровня;
• телефонной связи с каналообразующей аппаратурой.
№ 7
- верхний уровень:
• АРМ диспетчера;
• АРМ администратора;
• монитора реального времени;
• сервера связи с верхним уровнем.
№ 8
Системой контроля процессов бурения нефтяных и газовых скважин типа ПКБ контролируются:
• крутящий момент на роторе;
• частота вращения на роторе;
• расход промывочной жидкости;
• давление промывочной жидкости.
№ 9
Геолого-технологической станцией типа “Разрез-2” контролируются:
• плотность, температура и уровень промывочной жидкости в емкостях;
• давление промывочной жидкости;
• перемещение талевого блока;
• крутящий момент на роторе.
№ 10
Измерения искривления буровой скважины с помощью инклинометра:
• инклинометрия.
№ 11
Нижний уровень современной системы управления магистральными нефтепроводами содержит столько кустов:
• сколько требует технологический процесс.
№ 12
В системе измерения толщины стенок труб используется:
• тензорезисторный преобразователь.
№ 1-3
Устройства связи с объектом выполняют:
• фильтрацию напряжения промышленной частоты;
• согласование выходных сигналов датчиков со входами измерительных каналов системы.
• нормализацию аналогового сигнала.
• обеспечивают гальваническую развязку между источником аналогового или дискретного сигналов и измерительными каналами системы;
• усиливают сигналы, поступающие на исполнительные механизмы.
№ 4
Величина входного сопротивления модуля АДАМ-3012 в режиме измерения тока:
• 250 Ом.
№ 5
При построении узлов АСУ ТП имеют наибольшую избыточность:
• модули ввода/вывода на 16 каналов.
№ 6
Сколько входов/выходов имеют устройства связи с объектом, выпускаемые фирмой WAGO:
• определяет Заказчик.
№ 7
Схема защиты в модуле 5В32-02 фирмы ANALOG DEVICES:
• защита от перенапряжения на входе.
№ 8
При мультиплексированном включении модуля вывода используется:
• разрешение прохождения сигнала на выход.
№ 1
Микропроцессорный вычислитель контроллера “РЕМИКОНД-100” включает:
• ОЗУ1;
• ОЗУ2;
• ПЗУ;
• ЦП.
№ 2
В контроллерах семейства SIMATIC S5 используется программирование:
• линейное;
• структурированное.
№ 3
К контроллерам в системах контроля и управления комплексом специального назначения предъявляются требования:
• отказоустойчивость контроллера с длительным сроком активного существования;
• большая мощность вычислительного комплекса;
• наличие резервированного вычислительного комплекса.
№ 4
Отказоустойчивость контроллера достигается:
• схемой программно-аппаратного управления тремя микроЭВМ и двумя интерфейсными каналами по входу и выходу.
№ 5
Время обработки 1000 команд процессором CPU 944:
• 3 мс.
№ 6
- процессором CPU 941:
• 30 мс.
№ 7
Объем оперативной памяти процессора CPU 942:
• 10 кбайт.
№ 8
Общая память пользователя процессора CPU 943:
• 48 Кбайт.
№ 9
Процессор MODICON 984 серии 3220 может управлять:
• восемью координатами.
№ 10
Контроллер SIMATIC S5-115U используется:
• в различных областях.
№ 11
Алгоритм PID-регуляторов встроен в процессоры:
• CPU 942;
• CPU 943;
• CPU 944.
| на главную | база по специальностям | база по дисциплинам | статьи |
Другие статьи по теме
