
Гибкие автоматизированные системы и робототехника
Раводин О.М.
(Кафедра КИБЭВС)
Томск-2007
№ 1
Что такое “Система”?
• Все то, что мы хотим считать системой
• Совокупность элементов, объединенных одной целевой функцией.
№ 2
Модель объекта - это:
• система, обладающая интересующими нас свойствами объекта.
№ 3
Kакого типа бывают модели?
• Математическая.
• Физическая.
• Алгоритмическая.
№ 4
Система считается простой, если она:
• имеет адекватную модель.
№ 5
Система считается сложной, если:
• для нее нет адекватной модели.
№ 6
Система считается большой, если:
• для ее реализации не хватает ресурсов.
№ 7
Что происходит с системой при достижении целевой функции?
• Oна распадается.
• Oна перестает существовать.
№ 8
Что такое "Иерархическая система"?
• Система, элементы которой имеют подчинение сверху вниз.
№ 9
Как называется система, имеющая адекватную модель?
• Простая.
№ 10
Понятие "Технологический автомат" - чему оно соответствует?
• Технологическая машина, в которой выполнение цикла и его возобновление осуществляется без участия человека. Например, автомат для установки интегральных схем на плату.
№ 11
Понятие "Роботизированный технологический комплекс" - чему оно соответствует?
• Совокупность единицы технологического оборудования, ПР и средств оснащения, автономно функционирующая и осуществляющая многократные циклы.
№ 12
Понятие "Манипулятор" - чему оно соответствует?
• Управляемое устройство или машина, предназначенная для выполнения двигательных функций, аналогичных функциям руки человека при перемещениях объектов в пространстве, оснащенное рабочим органом, например - схватом.
№ 13
Понятие "Автооператор"- чему оно соответствует?
• Автоматическая машина, состоящая из исполнительного устройства в виде манипулятора и не перепрограммируемого устройства управления.
№ 14
Понятие "Промышленный робот" - чему оно соответствует?
• Автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления, предназначенного для выполнения в производственном процессе двигательных и управляющих функций.
№ 15
Понятие "Гибкий производственный модуль" - чему оно соответствует?
• Это единица оборудования с программным управлением для производства изделий произвольной номенклатуры в установленных пределах значений их характеристик, автономно функционирующая, автоматически осуществляющая все функции, связанные с их изготовлением, и имеющая возможность встраивания в ГПС.
№ 16
Какова главная целевая функция производственно-экономической системы?
• Получение прибыли.
№ 17
Для массового производства высокая прибыль позволяет:
• разработать индивидуальные технологические процессы с детальной проработкой;
• создать однопредметные автоматические линии на базе специальных и агрегатных станков;
• обеспечить высокую степень автоматизации.
№ 18
Для мелкосерийного производства характерно:
• отсутствие индивидуальных технологических процессов с детальной проработкой;
• групповые и индивидуальные процессы без детальной проработки;
• низкий уровень специализации;
• укрупнение операции (интегрирование).
№ 19
Особенность задач системного проектирования информационно-вычислительных комплексов (ИВК) и средств состоит в том, что они должны решаться на каких этапах жизненного цикла ИВК?
• Логический
• Технический
• Технологический
• Структурный
№ 20
Под моделью жизненного цикла создания понимается структура определяющая последовательность выполнения и взаимосвязь процессов действий и задач на протяжении стадии создания ВС. Что характерно для каскадной модели цикла?
• Переход на следующую стадию происходит только после завершения работы текущей стадии.
• Возврата на пройденные стадии не предусмотрено.
• На каждой стадии формируется законченный набор проектируемой документации.
• Выполнение в строгой последовательности стадии работ позволяет планировать сроки завершения работ и соответствующие задачи.
№ 21
Под моделью жизненного цикла создания понимается структура определяющая последовательность выполнения и взаимосвязь процессов действий и задач на протяжении стадии создания ВС. Что характерно для спиральной модели цикла?
• Сложно определить конец итерации.
• Система создается по частям с использованием метода прототипа.
• Избавляет заказчиков и разработчиков от полного и точного формирования.
• Более тесное взаимодействие заказчика и разработчика.
• Неполное завершение работ на каждой стадии тем не менее позволяет переходить на следующую стадию не дожидаясь полного завершения текущей.
№ 22
Что такое "управление"?
• Целенаправленное воздействие на систему.
• Организация движения по заданной траектории.
№ 23
Для поиска наилучшего управления необходимо задать:
• критерий качества;
• целевую функцию.
№ 24
Программное управление - это:
• вариант управления без обратной связи;
• вариант управления системой, имеющей адекватную модель.
№ 25
Какой тип управления соответствует целевой функции |x(t)-x0|=0 ?
• Система автоматического регулирования.
№ 26
Какой тип управления соответствует целевой функции |x(t)-xзад(t)|=0 ?
• Cледящая система.
№ 27
Какой тип управления соответствует целевой функции |x(t)-xзад(t)|=min ?
• Экстремальная система.
• Оптимальная система.
№ 28
Пусть dx/dt - скорость изменения состояния объекта. Для линейной функции g(x,u,h) как записать уравнение движения в векторной форме с учетом матриц преобразования F(t), G(t), Г(t)?
• dx(t)/dt = F(t)x(t) + G(t)u(t) + Г(t)H(t).
№ 29
Пусть dx/dt - скорость изменения состояния объекта. Для линейной функции g(x,u,h) как записать уравнение движения в векторной форме с учетом стационарности матриц преобразования F(t),G(t),Г(t)?
• dx(t)/dt = Fx(t) + Gu(t) + ГH(t).
№ 30
Пусть dx/dt - скорость изменения состояния объекта. Для линейной функции g(x,u) как записать уравнение движения в векторной форме с учетом стационарности матриц преобразования F(t),G(t),Г(t) и при отсутствии управляющих сигналов?
• dx(t)/dt = Fx(t) + ГН(t).
№ 31
Пусть dx/dt - скорость изменения состояния объекта. Для линейной функции g(x,u) как записать уравнение движения в векторной форме с учетом матриц преобразования F(t),G(t),Г(t) и отсутствия управления?
• dx(t)/dt = F(t)x(t) + Г(t)H(t).
№ 32
Пусть dx/dt - скорость изменения состояния объекта. При управлении от цифровой машины дифференциальное уравнение заменяется на разностное, т.е. dx/dt → (xn-xn-1) / τ. Пусть τ=1. Для линейной функции g(x,u) как записать уравнение движения в векторной форме с учетом матриц преобразования F(t), G(t), Г(t)?
• xn+1-xn=F[n]xn+G[n]un+Г[n]Hn.
• xn+1=Ф[n]xn+G[n]un+Г[n]Hn.
№ 33
Пусть dx/dt - скорость изменения состояния объекта. При управлении от цифровой машины дифференциальное уравнение заменяется на разностное, т.е. dx/dt → (xn-xn-1) / τ. Пусть τ=1. Для линейной функции g(x,u) как записать уравнение движения в векторной форме с учетом стационарности матриц преобразования F(t), G(t), Г(t)?
• xn+1=Фxn+Gun+ГHn.
• xn+1-xn=Fxn+Gun+ГHn.
№ 34
Пусть dx/dt - скорость изменения состояния объекта. При управлении от цифровой машины дифференциальное уравнение заменяется на разностное, т.е. dx/dt → (xn-xn-1) / τ. Пусть τ=1. Для линейной функции g(x,u) как записать уравнение движения в векторной форме при отсутствии шумов и с учетом матриц преобразования F(t), G(t), Г(t)?
• xn+1-xn=F[n]xn+G[n]un.
• xn+1=Ф[n]xn+G[n]un.
№ 35
Гибкое производство предполагает экономическое управление, организационное, техническое, управление технологическими процессами. Какие задачи и с каким периодом решаются при экономическом управлении?
• Долговременное планирование производства.
• Год.
• Годы.
№ 36
Гибкое производство предполагает экономическое управление, организационное, техническое, управление технологическими процессами. Какие задачи и с каким периодом решаются при организационном управлении?
• Долговременное распределение оборудования и ресурсов.
• Год.
• Месяцы.
№ 37
Гибкое производство предполагает экономическое управление, организационное, техническое, управление технологическими процессами. Какие задачи и с каким периодом решаются при техническом управлении?
• Организация процесса изготовления изделий.
• Сутки.
• Часы.
• Минуты.
№ 38
Пусть вектор Х - технологические входы, представляющие собой предметы труда; вектор R - средства труда; вектор L - живой труд, т. е. люди, участвующие в производстве.
Выходом V производственного процесса является выпуск готовой продукции.
В ответ введите производственную функцию в общем виде.
Ответ: V=F(X, L, R)
№ 39
Самолет под действием порывов ветра отклонился от заданного направления на угол FI1. Поворотом руля на угол ϑ курсовая ошибка компенсируется. Самолет имеет момент инерции J: J(d²FI1 / dt²)=-kϑ(t)+m(t), где kϑ(t) - восстанавливающая сила; m(t) - момент, вызванный порывами ветра.
Вводим обозначения b=-k/J, FI1(t)=m(t) / J, ϑ(t)=u(t), x1=FI1′, x2=d²FI1 / dt²=x1′,
В векторной форме получим: xt′=Fх(t)+Gu(t)+ГFI1(t).
Какой вид имеет матрица F?
• 0 1
0 0
№ 40
Самолет под действием порывов ветра отклонился от заданного направления на угол FI1. Поворотом руля на угол ϑ курсовая ошибка компенсируется. Самолет имеет момент инерции J: J(d²FI1 / dt²)=-kϑ(t)+m(t), где kϑ(t) - восстанавливающая сила; m(t) - момент, вызванный порывами ветра.
Вводим обозначения b=-k/J, FI1(t)=m(t) / J, ϑ(t)=u(t), x1=FI1′, x2=d²FI1 / dt²=x1′,
В векторной форме получим: xt′=Fх(t)+Gu(t)+ГFI1(t).
Какой вид имеет матрица G?
• 0
b
№ 41
Самолет под действием порывов ветра отклонился от заданного направления на угол FI1. Поворотом руля на угол ϑ курсовая ошибка компенсируется. Самолет имеет момент инерции J: J(d²FI1 / dt²)=-kϑ(t)+m(t), где kϑ(t) - восстанавливающая сила; m(t) - момент, вызванный порывами ветра.
Вводим обозначения b=-k/J, FI1(t)=m(t) / J, ϑ(t)=u(t), x1=FI1′, x2=d²FI1 / dt²=x1′,
В векторной форме получим: xt′=Fх(t)+Gu(t)+ГFI1(t).
Какой вид имеет матрица Г?
• 1
0
№ 42
Самолет под действием порывов ветра отклонился от заданного направления на угол FI1. Поворотом руля на угол ϑ курсовая ошибка компенсируется. Самолет имеет момент инерции J: J(d²FI1 / dt²)=-kϑ(t)+m(t), где kϑ(t) - восстанавливающая сила; m(t) - момент, вызванный порывами ветра.
Вводим обозначения b=-k/J, FI1(t)=m(t) / J, ϑ(t)=u(t), x1=FI1′, x2=d²FI1 / dt²=x1′,
В векторной форме получим: xt′=Fх(t)+Gu(t)+ГFI1(t).
Какой вид имеет матрица X?
• x1
x2
№ 43
Исторически можно выделить следующие типы СЧПУ:
1. Элементная база - дискретные полупроводниковые элементы и микросхемы малой степени интеграции - NC.
2. Элементная база - микропроцессорные наборы, одномашинные системы - CNC.
3. База - компьютер типа РС и специализированный интерфейс - CNC-PC.
№ 44
Задачи реального времени решаются:
• в реальном масштабе времени.
№ 45
При управлении от цифровой машины обычно решаются четыре основных задачи. Назовите их.
• Геометрическая.
• Логическая.
• Технологическая.
• Связь с оператором.
№ 46
При управлении от цифровой машины обычно решаются четыре основных задачи: геометрическая, логическая, технологическая, связь с оператором. Какая из них является самой сложной с точи зрения управления?
Ответ: геометрическая задача
№ 47
Что относится к геометрической задаче?
• Расчет траектории движения в многомерном пространстве.
• Интерполяция.
• Вычисление вектора скорости.
• Управление следящими приводами.
• Опрос датчиков.
• Управление шаговыми приводами.
№ 48
Что относится к логической задаче?
• Обслуживание пульта управления (вкл/ выкл питания, сигнальные индикаторы, переключатели и т.п.).
• Релейное управление простыми приводами.
• Управление электроавтоматикой.
• Анализ состояния дискретных входных ключей.
• Формирование логических сигналов на выходные ключи.
№ 49
Прерывание - это:
• смена задачи с последующим возвращением в снятую задачу.
№ 50
Из каких слов состоит вектор прерывания?
• Адрес программы.
• Флаги.
№ 51
Содержимое каких ячеек обязательно изменяется при вводе вектора прерывания?
• Счетчик команд.
• Указатель стека.
№ 52
Известно три типа организации стека. Какой из них использует операционная система?
• Аппаратно-программный.
№ 53
Внешнее устройство ИВК собрало и предварительно обработало информацию. Какой из режимов нужно использовать для ввода данных в ЭВМ?
• Режим прямого доступа к памяти.
№ 54
Внешнее устройство ИВК собрало информацию. Какой из режимов нужно использовать для обработки этих данных в ЭВМ?
• Режим прерывания.
№ 55
В операционных системах есть понятие процесс. Из каких элементов он состоит?
• Дескриптор.
• Паспорт.
• Программа.
№ 56
При использовании принципа семафоров в мониторе операционной системы заложен:
• алгоритм обслуживания запросов.
№ 57
При использовании в системе управления активного монитора-менеджера операционной системы в нем заложен:
• алгоритм работы системы.
№ 58
Процесс находится в состояния ожидание. Где при этом находится программа?
• в ОЗУ.
№ 59
Процесс находится в состояния готов. Где при этом находится программа?
• В ОЗУ.
№ 60
Процесс находится в состояния инициализация. Где при этом находится программа?
• В ОЗУ.
№ 61
Процесс находится в состояния снят. Где при этом находится программа?
• В ОЗУ.
• На винчестере.
• На внешнем устройстве.
• В ПЗУ
№ 62
Процесс находится в состояния готов. Для его инициализации можно использовать режим:
• обращения к подпрограмме;
• системного прерывания.
№ 63
Процесс находится в состояния инициализация. Для перевода его в состояние ожидания можно использовать режим:
• прерывания от внешнего устройства.
№ 64
Процесс находится в состояния ожидания. Для перевода его в состояние инициализация можно использовать режим:
• выход из прерывания.
№ 65
Процесс находится в состояния инициализация. Для перевода его в состояние снято можно использовать режим:
• прерывания от внешнего устройства.
№ 66
Процесс находится в состояния ожидание. Для перевода его в состояние снято можно использовать режим:
• прерывания от внешнего устройства.
№ 67
Из функций G, X, Y, M, L, N, F, какая обязательно должна присутствовать в каждом технологическом кадре?
Ответ: (n)
№ 68
Из функций G, X, Y, M, L, N, F, какая задает скорость подачи в технологическом кадре?
Ответ: (F)
№ 69
Из функций G, X, Y, M, L, N, F, какие задают точку позиционирования в технологическом кадре?
Функции в ответ вводите через пробел.
Ответ: (x y)
№ 70
Из функций G, X, Y, M, L, N, F, какая позволяет организовать цикл в технологическом кадре?
Ответ: (L)
№ 71
Из функций G, X, Y, M, L, N, F, какая задает тип позиционирования в технологическом кадре?
Ответ: (G)
№ 72
Из функций G, X, Y, M, L, N, F, какая задает вспомогательные функции в технологическом кадре?
Ответ: (M)
№ 73
Есть функции G, X, Y, M, L, N, F. В третьем кадре технологической программы требуется позиционировать рабочий орган в точке с координатами 40, 30. Напишите программу.
• N3 G00 X40 Y30.
№ 74
Есть функции G, X, Y, M, L, N, F. В пятом кадре технологической программы требуется позиционировать рабочий орган в точке с координатами 44, 30. Напишите программу.
• N5 G00 X44 Y30.
№ 75
Есть функции G, X, Y, M, L, N, F. В пятом кадре технологической программы требуется вывести рабочий орган в точку с координатами 44, 30 со скоростью 200. Напишите программу.
• N5 G90 X44 Y30 F200.
№ 76
Есть функции G, X, Y, M, L, N, F. В пятом кадре технологической программы требуется вывести рабочий орган в точку с приращением по координатам 44, 30 со скоростью 200. Напишите программу.
• N5 G91 X44 Y30 F200.
№ 77
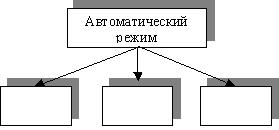
На рис. представлен первый уровень декомпозиции транспортного робота. Какие элементы нужно добавить?
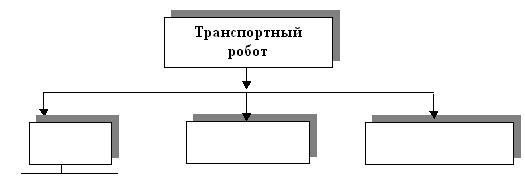
• Механика.
• Вычислительная система.
• Программное обеспечение.
№ 78
На рис. представлена часть декомпозиции транспортного робота. Какие элементы нужно добавить?
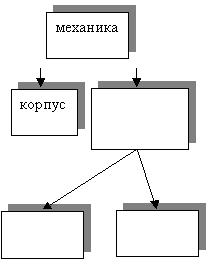
• Исполнительные механизмы.
• Датчики.
• Следящие привода.
№ 79
На рис. представлена часть декомпозиции транспортного робота. Какие элементы нужно добавить?
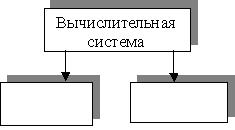
• Универсальная ЭВМ.
• Специализированный интерфейс.
№ 80
На рис. представлена часть декомпозиции транспортного робота. Какие элементы нужно добавить?
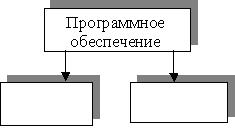
• Прикладное ПО.
• Системное ПО.
№ 81
На рис. представлена часть декомпозиции состояний робототехнической системы. Какие элементы нужно добавить?
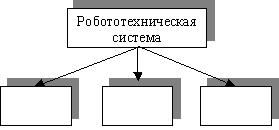
• Загрузка.
• Выход.
• Работа.
№ 82
На рис. представлена часть декомпозиции состояний робототехнической системы. Какие элементы нужно добавить?
• Останов.
• Пуск.
• Сброс.
№ 83
Режим восстановление робота - это движение:
• в точку с нулевыми координатами.
№ 84
Режим мерные перемещения робота - это движение:
• в точку с введенными координатами.
№ 85
Режим немерные перемещения робота - это движение:
• с введенным направлением скорости.
№ 86
Kак записать векторное уравнение, связывающее курсовую скорость VK с компонентами VX и VY?
• VK=VXi+VYj
№ 87
Заданную траекторию движения робота при управлении от цифровой машины можно представить в виде:
• ломаной линии.
№ 88
На рис. приведена структура следящего привода с управление по координате. Запишите дифференциальное уравнение для него (передаточные коэффициенты всех элементов равны 1).
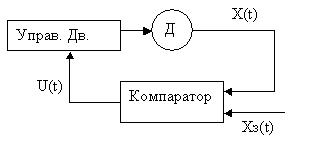
• dX/dt = X(t)-Xз(t).
№ 89
Имеется двухкоординатный (X,Y) привод, управляемый по релейному закону. Перемещение производится из текeщей точки X(t), Y(t) в заданную Xз, Yз с заданной курсовой скоростью Vk. Запишите формулу для вычисления компонент Vx, Vy.
• VX=sign(Xз-Xt)×Vk, VY=sign(Yз-Yt)×Vk
№ 90
Напишите формулы для вычисления компонент вектора скорости Vx и Vy, для заданной курсовой скорости Vk.
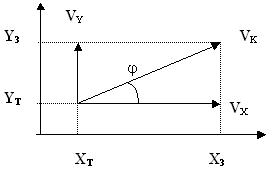
• VX=Vkcosθ, VY=Vksinθ, arctgθ=(Yз-Yt) / (Xз-Xt)
№ 91
Пусть Vk=5, наброс скорости ΔV=2, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя асимптотический закон управления Vx=(Xз-Xt)×Vk, Vy=(Yз-Yt)×Vk, рассчитать, где будет находиться робот в момент времени и t=5.
В ответ введите координаты x и y через пробел.
Ответ: (16 18)
№ 92
Пусть Vk=5, наброс скорости ΔV=2, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя асимптотический закон управления Vx=(Xз-Xt)×Vk, Vy=(Yз-Yt)×Vk, рассчитать, где будет находиться робот в момент времени и t=6.
В ответ введите координаты x и y через пробел.
Ответ: (12 28)
№ 93
Пусть Vk=5, наброс скорости ΔV=3, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя асимптотический закон управления Vx=(Xз-Xt)×Vk, Vy=(Yз-Yt)×Vk, рассчитать, где будет находиться робот в момент времени и t=5.
В ответ введите координаты x и y через пробел.
Ответ: (16 30)
№ 94
Пусть Vk=5, наброс скорости ΔV=3, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя асимптотический закон управления Vx=(Xз-Xt)×Vk, Vy=(Yз-Yt)×Vk, рассчитать, где будет находиться робот в момент времени и t=6.
В ответ введите координаты x и y через пробел.
Ответ: (15 36)
№ 95
Пусть Vk=5, наброс скорости ΔV=2, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя релейный закон управления, рассчитать, где будет находиться робот в момент времени и t=5.
В ответ введите координаты x и y через пробел.
Ответ: (14 16)
№ 96
Пусть Vk=5, наброс скорости ΔV=2, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя релейный закон управления, рассчитать, где будет находиться робот в момент времени и t=6.
В ответ введите координаты x и y через пробел.
Ответ: (15 21)
№ 97
Пусть Vk=5, наброс скорости ΔV=4, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя релейный закон управления, рассчитать, где будет находиться робот в момент времени и t=5.
В ответ введите координаты x и y через пробел.
Ответ: (15 19)
№ 98
Пусть Vk=5, наброс скорости ΔV=4, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя релейный закон управления, рассчитать, где будет находиться робот в момент времени и t=6.
В ответ введите координаты x и y через пробел.
Ответ: (12 24)
№ 99
Пусть Vk=7, наброс скорости ΔV=4, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя релейный закон управления, рассчитать, где будет находиться робот в момент времени и t=5.
В ответ введите координаты x и y через пробел.
Ответ: (10 24)
№ 100
Пусть Vk=7, наброс скорости ΔV=4, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 20). Используя релейный закон управления, рассчитать, где будет находиться робот в момент времени и t=6.
В ответ введите координаты x и y через пробел.
Ответ: (10 27)
№ 101
Пусть Vk=7, наброс скорости ΔV=4, время цикла t=1. В момент t=0 координаты (0, 0), конечная - (10, 30). Используя релейный закон управления, рассчитать, где будет находиться робот в момент времени и t=6.
В ответ введите координаты x и y через пробел.
Ответ: (10 31)
| на главную | база по специальностям | база по дисциплинам | статьи |
Другие статьи по теме
