
Системотехника, вычислительные комплексы и сети ЭВС
для специальности 220500, 220503, 220507
Кафедра КИБЭВС
Прищепа Л.С.
Томск-2002
№ 1
Свойства алгоритма.
• Алгоритм – это план c ограниченными свойствами.
№ 2
Формат команды П-машины?
• КОП.В.С.
№ 3
Отличие плана и алгоритма решения в отношении наборов данных?
• Массовость.
№ 4
- в отношении указания следующего шага решения?
• Определенность
№ 5
- в отношении выполнения очередного шага решения?
• Результативность.
№ 6
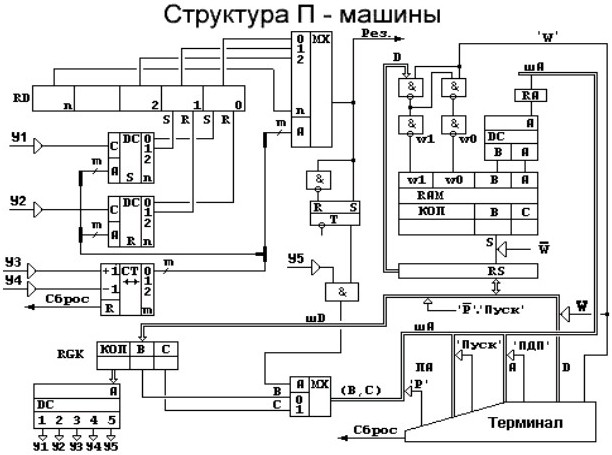
Структура П-машины. Соответствие выходов ДС (S, R) разрядам RD:
• RDj : = DCj (S,R).
№ 7
В регистре данных RD для П-машины использован элемент памяти:
• R-S триггер.
№ 8
Структура П-машины. Организация записи и чтения разрядов регистра данных:
• DC(S); DC(R); MX(REZ); RD; CT.
№ 9
Согласование разрядности RD и счетчика СТ разрядов П-машины:
• n = 2 ** m.
№ 10
Формат регистра команд для П-машины:
• КОП.В.С.
№ 11
Чтение полей В и С регистра команд П-машины:
• Y5&MX(REZ), RD, MX(B,C), RGK, MX(REZ).
№ 12
Подключение шины (В, С) к адресной шине шА П-машины:
• Сигналом “Р” пультового терминала.
№ 13
Состояние выхода элемента И, управляющего мультиплексором отсылок (В, С) для П-машины:
• RD, MX(REZ),СТ,Y5&MX(REZ).
№ 14
Шина А (терминала) к шине шА для П-машины подключена:
• Сигналом “ПДП” пультового терминала.
№ 15
Шина D (терминал) к шине шD для П-машины подключена:
• Сигналом “W” пультового терминала.
№ 16
Как связан порт RS ввода-вывода ОЗУ с шD и RAM для П-машины.
• RS:=RAM& W; шD:=RS& P ПУСК.
№ 17
Передача данных из RAM в регистр команд RGK для П-машины:
• RGK:= шD; шD:=RS& P ПУСК; RS:= W RAM.
№ 18
Организация записи в RAM:
• A, D, W.
№ 19
Последовательность активизации структурных элементов П-машины (RA, шA, RAM, ДС, RS, терминал) в режиме записи адреса сообщения в ОЗУ.
• терминал, шА, RA, DC, RAM.
№ 20
- при передаче данных к ОЗУ (RS, RAM, терминал, шD, шинаD).
• терминал, шинаD, шD, RS, RAM.
№ 21
Функции порта ввода-вывода ОЗУ П-машины:
• Организует связь шD с ОЗУ.
№ 22
При записи команд в ОЗУ П-машины достаточны и необходимы данные:
• A, D, W.
№ 23
Для чтения из памяти П-машины достаточны данные:
• A, W.
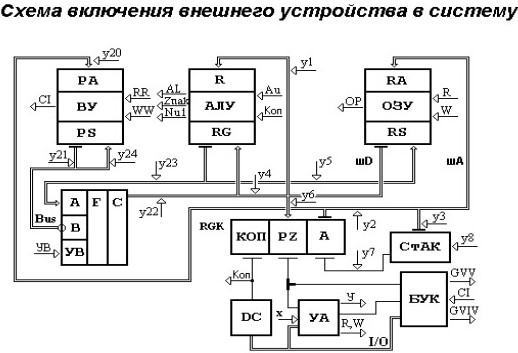
№ 24
Как подключено ОЗУ к процессору БУ ЭВМ в режиме “чтение”.
• ОЗУ подключено к шине данных шD процессора через порт RS ввода-вывода, управляемый сигналами Y1 или Y4 или Y6.
№ 25
Для ввода-вывода данных в БУ ЭВМ использован регистр РАЛУ:
• RG.
№ 26
Управляющий сигнал У5 для организации ввода-вывода данных РАЛУ для БУ ЭВМ выбран потому, что он:
• управляет портом RG ввода-вывода РАЛУ: Y5 = 1 – чтение данных, а Y5 = 0 – запись данных.
№ 27
НУЛЬ, ЗНАК в РАЛУ для БУ ЭВМ.
• Признаки ЗНАК, НУЛЬ результата определены по содержимому регистра АКК.
№ 28
Запись на дополнительный регистр R арифметико-логического устройства БУ ЭВМ организует управляющий сигнал:
• Y1.
№ 29
- передачу адреса данных для ОЗУ:
• Y2.
№ 30
- передачу адреса очередной команды:
• Y3.
№ 31
К- передачу данных для ОЗУ из РАЛУ:
• Y5.
№ 32
- передачу данных из ОЗУ в РАЛУ:
• Y5 и (Y1 или Y4).
№ 33
- ввод данных в RGK:
• Y6.
№ 34
- модифицируют счетчик команд СТАК:
• Y7 или Y8.
№ 35
Формат команды БУ ЭВМ. “Длина” команды группы АО в зависимости от бита PZ:
• РZ=1 – удлиняется.
№ 36
Изменение команды посылочной группы при назначении бита PZ (0/1) для БУ ЭВМ:
• PZ=0 – прием данных для РАЛУ, PZ=1 – выдача данных из РАЛУ.
№ 37
Подключение внешнего устройства (ВУ) к процессору БУ ЭВМ.
• шА:= RGK(А); Y20) РА:=шА; Y22) RG:=F(C); Y21, Y24) PS ↔ F, YB:= (0,1); Y23) F(А):= RG.
№ 38
Подключение процессора БУ ЭВМ к ВУ организует элемент системы:
• F(YB), шА.
№ 39
Как единообразно процессор начинает обмен с ВУ для БУ ЭВМ.
• Y20) PA:=шA, шA:=RGK(A).
№ 40
Различие циклов обмена ВУ при чтении или записи данных:
• Отличие заключается в направлении передачи данных и моментом поступления сигнала синхронизации процесса: прием данных для ВУ, затем сигнал WW; сначала сигнал RR, затем передача данных из ВУ.
№ 41
Адрес обращения к ВУ необходимо сохранять, так как
• интервал приема А и интервал работы с D разделены во времени.
№ 42
Организация записи данных в ВУ:
• PA:=RGK(A); PS:=RG; сигнал WW.
№ 43
Организация чтения данных ВУ:
• PA:=RGK(A); сигнал RR; RG:=PS.
№ 44
Направление обращения к ВУ от БУ ЭВМ определено управляющим сигналом:
• Y20, YB(0,1).
№ 45
Размещение трех слов команды в процессоре:
• RA, RD1, RGK.
№ 46
Осуществление выборки слов команды из ОЗУ:
• RА:=R7, Y6, DA, Y16, F(Y21), BUS4, BUS3, Y18, микропрограмма с приемником (RGK или RA или RD1).
№ 47
Записи формата команды, данных и адресов представлены в:
• Восьмеричной системе счисления.
№ 48
Источник или приемник данных в формате команды определены:
• Методами адресации SS и DD.
№ 49
Причина, по которой используют методы адресации источника или приемника данных:
• Методы адресации в формате команды с фиксированной разрядностью используют по той причине, что в ее разрядной сетке не хватает места для данных и адреса.
№ 50
Количество методов адресации источника или приемника данных:
• Восемь.
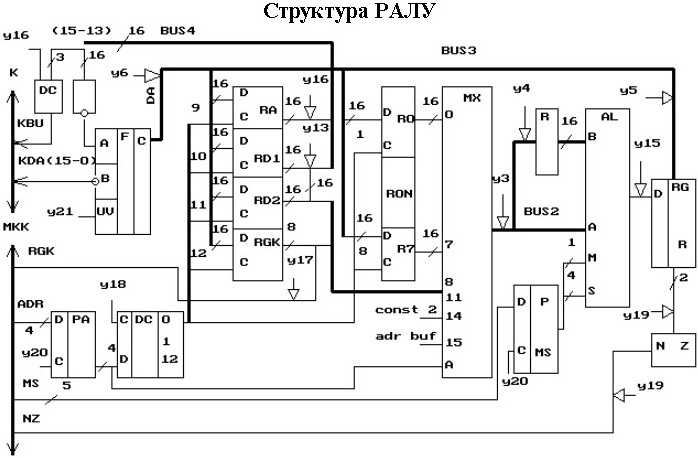
№ 51
К системному каналу РАЛУ подключено средствами:
• KBY, KAD, F(Y21).
№ 52
Шины связывающие элементы РАЛУ:
• BUS1, BUS2, BUS3, BUS4.
№ 53
Рабочие регистры в составе РАЛУ:
• RA, RD1, RD2, RGK.
№ 54
Количество регистров общего назначения в составе РАЛУ:
• Восемь.
№ 55
Регистры РАЛУ подключенные к микроканалу:
• PMS, RGK, PA, NZ.
№ 56
Функция, которую в схеме РАЛУ выполняет мультиплексор МХ?
• Читает R0…R7, RGK, RD1, RD2, константы и загружает шину BUS2.
№ 57
Шины BUS в схеме РАЛУ:
• Мультиплексируемые управляемые.
№ 58
Результат обработки данных хранится в:
• RGR.
№ 59
Функция дешифратора ДС (РА):
• Синхронизирует чтение данных BUS3.
№ 60
Какие логические цепи образуются в РАЛУ при организации пересылки (Ri:=Rj)? Какие значения принимают при этом поля PMS, PA микрокоманды?
• RGR:= Rj, PMS = 1, PA = j; Ri:=RGR, PA=i.
№ 61
Функции, выполняемые рабочими регистрами РАЛУ?
• Хранят адрес, операнды и первое слово команды.
№ 62
Шина BUS3 имеет два входа:
• DA и REZ.
№ 63
Для передачи данных между регистрами РАЛУ использованы управляющие сигналы (или биты микрокоманды):
• Y20, Y3, Y15, Y5, Y18.
№ 64
Операнды на входы А и В арифметико-логического устройства поступают:
• Через BUS2 и R.
№ 65
В цепи АЛУ необходимо включение дополнительного регистра:
• Вход В и выход АЛУ.
№ 66
Логические цепи, которые образует каждая микрокоманда секции 9:
• Ri – MX – BUS2 – R; RJ – MX – BUS2 – АЛУ – RGR; RGR – BUS3 - Rj.
№ 67
Функции каждой микрокоманды секции 9:
• R:= RE; RGR:= RK*R; RK :=RGR.
№ 68
Для АОС3 загружать R7 перед исполнением последовательности секций микропрограмм необходимо,
• чтобы указать адрес первого слова интерпретируемого фрагмента программы пользователя.
№ 69
Общность в исполнении функций микропрограммных секции 10 и 9 проявляется в том,
• что они реализуют операции межрегистрового обмена и имеют микрооперацию Ri:=RGR.
№ 70
Различия в исполнении функций микропрограммных секций 10 и 9 проявляются в том,
• что они реализуют или пересылку, или обработку или одноместных, или двухместных операций над данными.
№ 71
Операция “Сравнение” выполняется так:
• R:=DD, BUS2:=SS, RGR:=BUS2 – R.
№ 72
Отличия выполнения операции “Сравнение” от операции “Вычитание”.
• “Сравнение”: R:=DD, BUS2:=SS, RGR:=BUS2 - R; “Вычитание”: R:=SS, BUS2:=DD, RGR:=BUS2 - R, DD:=RGR.
№ 73
Подготовку обработки двухместных операций организуют управляющие сигналы:
• Y3, Y4.
№ 74
Вычисление признаков N и Z результата операции:
• RGR = 0, то Z = 1, N = 0.
№ 75
Возможно вычисление RGR : = RDI + RD2.
№ 76
Адрес, который присвоен RD1и RD2:
• 9 и 10.
№ 77
Входные данные AЛУ и результат представлены в:
• Двоичной системе счисления.
№ 78
Обращение процессора к каналу подтверждено системным сигналом:
• К СИА.
№ 79
Назначение сигнала “КВУ”:
• Разделение областей памяти ОЗУ и ВУ.
№ 80
Процессор перед вводом данных располагает:
• Адресом обращения в RA и адресом приемника этих данных (RGK или RA или RD1 или RD2).
№ 81
Состояние линий BUS4 (15-13) при загрузке канала адресом 2000 восьмеричное:
• 0.0.0.
№ 82
Чтение данных канала обеспечивается средствами РАЛУ:
• KAD, F(Y21), DA, Y6, BUS3, Y18.
№ 83
Загрузка адреса или чтение данных канала организована управляющим сигналом или битом микрокоманды:
• Y21(0,1).
№ 84
То, что адрес обращения в канале, подтверждает системный сигнал:
• КСИА, Y16, Y21.
№ 85
Запросом данных от ВУ является системный сигнал:
• КСИА, КСИП, КВВОД.
№ 86
То, что данные ВУ переданы подтверждает системный сигнал:
• КСИА, КСИП, КВВОД.
№ 87
Содержимое R7, после выполнения текущей команды:
• Модифицированное, плюс 2.
№ 88
Данные, принятые RGK, поступают:
• В центральное устройство управления.
№ 89
Логическая 1 в линиях шины BUS4 представлена:
• Низким уровнем электропитания РАЛУ.
№ 90
Логическая 1 на входе А шинного формирователя F представлена:
• Высоким уровнем электропитания РАЛУ.
№ 91
Последовательность, интерпретирующая команду MOV#D, @#A, включает:
• 9 микропрограммных секций.
№ 92
Для обращения к ВУ за записью данных необходимы рабочие регистры:
• RA, RD1.
№ 93
Запись данных в канал (линии KAD) организуется управляющими сигналами или битами микрокоманды:
• Y21 = 0, Y13.
№ 94
Различие обращения к ОЗУ и ВУ:
• КВY (0 или 1).
№ 95
Какой формат в машинном коде представления команды имеют поля адреса источника и приемника данных?
• Шесть двоичных или два 2-8-ричных.
№ 96
Для интерпретации косвенного метода адресации источника данных требуется:
• Две микропрограммные секции: 10 и 7.
№ 97
- косвенно-автодекрементного метода:
• Четыре микропрограммные секции: 9, 10, 6 и 7.
№ 98
В методах адресации данных используются операции АЛУ:
• Пересылка, сложение, вычитание.
№ 99
Предварительно уменьшения содержимого регистров общего назначения требуют методы адресации данных:
• Косвенно-автодекрементный, автодекрементный.
№ 100
Причина цепочек различной длины (количество слов), в представлении команды на уровне машинных кодов, заключается?
• В указании методами адресации адреса источника и/или приемника данных.
№ 101
Содержимое каких рабочих регистров процессора может быть загружено в канал (линии KAD)?
• RA или RD1.
№ 102
Процедура вычисления адреса ветвления выполняется,
• когда код операции управления программой совпадает с признаками результата предыдущей команды программы.
№ 103
Если условие ветвления не выполнено:
• Процессор будет выполнять команду с адресом, указанным в R7.
№ 104
Ветвление программы осуществляется:
• Относительно содержимого R7.
№ 105
Последовательность, интерпретирующая команду MOV R1, R2 управляющей микроЭВМ включает:
• 4 микропрограммные секции.
№ 106
- команду ADD R1, R2:
• 4.
№ 107
- SUB R1, R2:
• 4.
№ 108
- MOV (R1), R2:
• 6.
№ 109
- MOV (R1), +(R2):
• 8.
№ 110
- MOV -(R1), (R2):
• 8.
| на главную | база по специальностям | база по дисциплинам | статьи |
Другие статьи по теме
